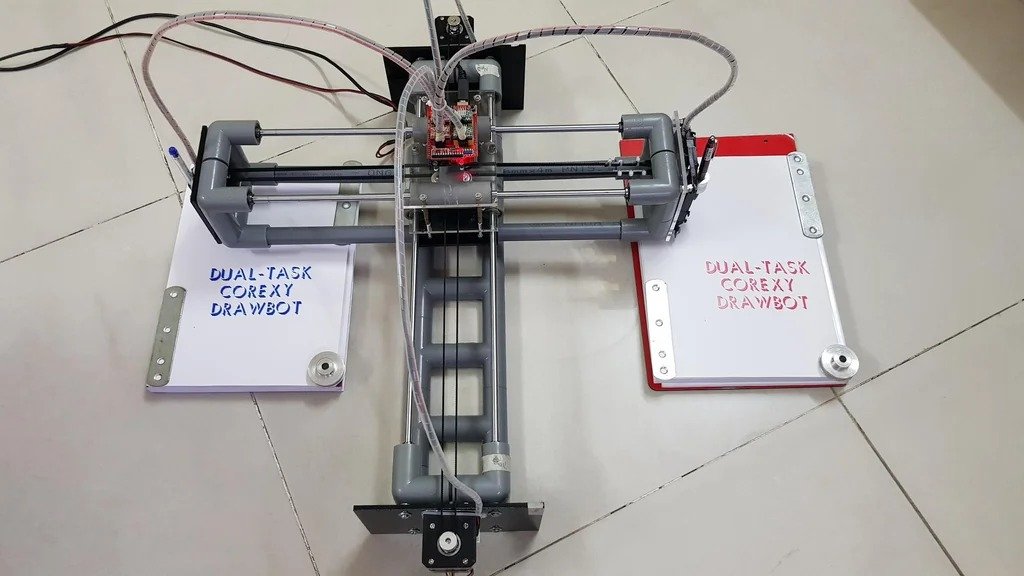
Даний верстат може одночасно виконувати два завдання, наприклад: малювати 2 однакових малюнка одночасно або використовувати пір’яний креслення і лазерне гравіювання одночасно.використання в конструкції пвх-труб, здешевлює конструкцію не впливаючи на якість.інструменти та матеріали: – плата мікроконтролера dfrduino uno r3-сумісний з arduino uno; – плата розширення arduino cnc shield v3 grbl; – 3-х осьова плата управління grbl з підтримкою лазерного гравера; – лазерний модуль 2500 мвт; – драйвер крокового двигуна a4988 – 4 шт;-кроковий двигун nema 17 – 2 шт;-два привода cd / dvd-rom;-50 мм l-опора крокового двигуна – 2 шт;-ремінь gt2 6мм – 3 метри;-gt2 алюмінієвий натяжний шків діаметром 5 мм без зубів для зубчастого ременя шириною 6 мм – 4 шт;-gt2 натяжний шків 5 мм, отвір 20 зубів;-gt2 шків 20 зубів – 2 шт;-круглий вал діаметром 8 мм, довжина 500 мм – 4шт;-вісім кулькових фланцевих підшипників 8 x 22 x 7 мм;-горизонтальний кронштейн для шарикопідшипника або вертикальний кронштейн для шарикопідшипника – 8 шт;-алюмінієва муфта з гнучким валом, розмір внутрішнього отвору: 10 мм x 10 мм – 2 шт;-блок живлення 12/24 в постійного струму;-прозорий / білий акрил, розмір a3, товщина не менше 5 мм – 2 шт;-проставки латунні l-10мм-4 шт; – стрічковий кабель 2 метри x 8p / 16p;-штекер живлення постійного струму 5 мм;-кабельні стяжки;-кріплення;-трійник ø21мм з пвх-14шт; – трійник з пвх ø21мм-16шт;-труба пвх ø21 мм – 4 метри;-свердлильний верстат; – ручна ножівка;-паяльне обладнання; прошивка і програмне забезпечення:-grbl;-inkscape;-lasergrbl;-engraver master; – універсальна платформа gcode (ugs); крок перший: принцип работыработа верстата заснована на прошивці grbl і використовує вбудовану кінематику corexy в grbl. Його основна рама і опори виготовлені з пвх-труб і акрилових листів. Він має робочий діапазон y350 мм x x320 мм, а його детальна конфігурація показана нижче на фото.
Верстат має дві осі z (»a ” клон осі z), тому можна одночасно малювати два ідентичних зображення або тексту.рух drawbot описується наступним чином: x і y обертаються за годинниковою стрілкою: y-x і y обертаються проти годинникової стрілки: y + x повернути за годинниковою стрілкою, а y повернути проти годинникової стрілки: x-крок другий: нерухома рама – вісь усначала він з’єднав 4 трійника пвх ø21 мм. Були зроблені два таких набору (так звані опори y) для 2 кінців осі y. Пізніше на них будуть встановлені два крокових двигуна x і y. Щоб побудувати y-подібний вузол, він з’єднав 2 трійника з пвх діаметром 21 мм і вставив кулькові підшипники в в торці труб.потім він з’єднав 10 трійників пвх ø21 мм.
Далі потрібно зібрати вузол показаний на фото нижче. При складанні використовуються 2 вала t8 довжиною 500 мм.каретка розташована по центру повинна вільно переміщатися.
Крок третій: установка крокових двигунів x і удля кріплення двигунів майстер вирізав 2 акрилових листа розміром 180 x 120 x 5 мм і просвердлив 8 отворів. Чотири отвори використовуються для кріплення крокових двигунів на l-образних опорах, інші – для кріплення до y-образним опор в яких потрібно просвердлити отвори.нижній рівень каркаса з пвх і акрилових листів повинен бути на одному рівні.
Акрилові листи запобігають падінню верстата, коли вісь x рухається далеко від центральної лінії.
Крок четвертий: рухома рамка-вісь хкак і в разі осі y, майстер зробив два набори вузла x. Вони зроблені з 4 трійників пвх діаметром 21 мм.перший вузол x має два підшипника і проміжний шків з 20 зубами.
Другий вузол такий же, але замість шківа вкручені два гвинти m4 на відстані 20 мм.
Каретка виготовлена з 2-х трійників пвх. По торцях встановлені кулькові підшипники.
Для з’єднання двох вузлів потрібні дві пвх-труби діаметром 21 мм, довжиною близько 500 мм.
Нарешті потрібно зібрати вузол.
Крок п’ятий: шківи для ремнейдля кріплення роликів майстер вирізав акриловий лист розміром 120х120 мм.у пластині просвердлив отвори для її кріплення і для кріплення роликів. Відстань між роликами 12 мм.пластина кріпиться до каретки за допомогою проставок з різьбленням.
Потім вирізав ще два акрилових листа 120х120 мм один, чорний, – для посилення вузла, другий для електроніки.
Крок шостий: вісь z + адля установки приводів потрібен акриловий лист 120х100 мм.пластини кріпляться, з встановленими приводами, кріпляться на торці осі z. Потім можна зібрати весь верстат.
Тепер потрібно відрізати і встановити ремені.
Крок сьомий: тестуванняпісля збірки майстер встановлює електроніку і тимчасово підключає за допомогою стрічкових кабелів. Перевіряє роботу ардуіно, приводів і крокових двигунів,
Крок восьмий: налаштування grbl увімкніть кінематику corexy в прошивці grbl:завантажуємо файли прошивки grbl.копіюємо grbl в папку c: users administrator documents arduino libraries переходимо в папку c: users administrator documents arduino libraries config.h . Розкоментуємо командний рядок “#define corexy”, щоб включити кінематику corexy.конфігурацію самонаведення для corexy виправляємо наступним чином:
Показати / приховати текст
Далі завантажуємо прошивку grbl на arduino uno:зверніть увагу, що потрібно змінити grbl в config.h як згадувалося вище, перед завантаженням прошивки grbl в arduino.відкриваємо arduino ide, в меню “file” вибираємо examples ‣ grbl ‣ grblupload.вибираємо правильний порт і плати (arduino uno) ‣ compile і завантажити arduino uno.налаштування кроку / мм: дозвіл переміщення по осях x і y ($100&$101):кроків двигунів x і y на оборот: 200.микрошаг: 8.кількість зубів шківів: 20.крок ременя:2 мм.$100&$101 = (200 кроків * 8 мікрошагів) / (крок 2 мм * шків 20 зубів) = 40 крок / мм
Дозвіл переміщення по осі z ($102): кроків двигунів z кроків на оборот: 20.микрошаг: 1.крок ходового гвинта: 3 мм.$102 = (20 кроків x 1 мікрошаг) / (крок 3 ходових гвинтів) = 6,667 кроку / мм. Крок дев’ятий: програмне забезпечення g-кодадля створення файлів g-коду з текстів або зображень майстер використовував наступні програми: розширення inkscape і gcodetools.lasergrbl .engraver master.
Щоб відправити файл g-коду, створений вищевказаним програмним забезпеченням, на контролер він використовував універсальну платформу gcode (ugs) .
Хоча верстат ще не завершений, майстер протестував його роботу.
Крок дев’ятий: завершення работивсе працює і тепер можна остаточно зібрати верстат. Він встановив прозорий акриловий лист на верхню частину опори для ременя.
Ручку можна замінити на лазерний модуль або встановити лазер на обох “плечах” верстата.
джерело (source)
Стаєте автором сайту, публікуйте власні статті, описи саморобок з оплатою за текст.детальніше тут.




